The term deep learning originates from the study of artificial neural networks. In order to allow computers to solve problems through continuous learning, academics tried to imitate the neural networks of tens of billions of neurons in the human brain, and proposed learning strategies called “neural networks” for computers.

Image source: DeepLearning.AI, Deep Learning Specialization, Neural Networks and Deep Learning Course
The figure shows a simple neural network with four input values. The leftmost “x” is the input layer, and the small circle in the middle is the hidden neuron, where each neuron takes all four features as input values and the neural network will decide independently what the intermediate network node is, and finally generate the output value “y”. The most important point for neural networks is that given enough training examples (x, y), the neural network can fit a function well enough to establish a mapping relationship between “x” and “y”.
With the advent of the era of big data, deep learning has been widely used in various fields that impact everyday life, such as speech, image, and facial recognition. Autowise.ai’s autonomous sweeper continues to achieve more functional iterations with the help of deep learning technology. Object detection is one of the classic applications of deep learning methods for identifying objects of interest from images, and determining the category and location. Current approaches based on deep learning can be broadly classified into two categories: the Two-Stage approach, which first finds regions where objects are likely to appear and later determines object categories, and the One-Stage approach, which extracts regions and objects in one step. The former’s R-CNN and Fast-RCNN are at the top of algorithm rankings; the latter’s YOLO, SSD, and RetinaNet are also popular in the industry. Unlike conventional applications of identifying people and animals, Autowise.ai applied this technology to a completely new scenario in the Duisburg project. This enabled accurate identification of special waste such as masks in contactless cleaning operations during the pandemic.

Autowise.ai autonomous sweeper recognizes masks
The challenges of autonomous sweeper operations also come from traffic, such as vehicles changing lanes and pedestrians crossing roads. Therefore, the ability to predict the intentions and future trajectory of vehicles and pedestrians quickly and accurately is crucial for self-driving systems. Deep learning is emerging as the dominant solution to this problem. LSTM structures and graph neural networks are the directions used for algorithm exploration.
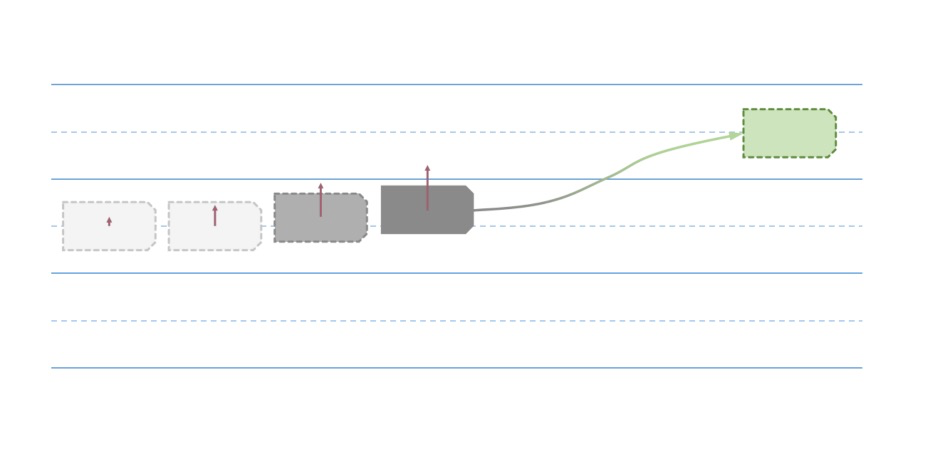
With the vehicle’s current route marked in seconds, Autowise.ai trains neural network structures with long short-term memory (LSTM) structures to act as a predictive brain. As shown in the figure below, during the first few observations of the obstructing vehicle, the lateral velocity of the vehicle to the left becomes greater, and the position gradually deviates to the left from the centerline of the current lane. The deep learning model determines its intention to change to the left lane, calculates the target position, and generates the corresponding trajectory.

Applying deep learning to determine vehicle lane changes
In addition to garbage, vehicles, and pedestrians, autonomous sweepers encounter special obstacles and weather challenges when conducting sweeping operations on open urban roads, from iron slabs, stones, and abandoned rail tracks, to paper, fallen leaves, dust, and water spray. Autowise.ai engineers use deep learning solutions to solve problems from these “x” variables. In the future, Autowise.ai will continue to explore the application of cutting-edge AI technologies in self-driving to provide safer and more efficient self-driving sanitation solutions.
References
[1]DeepLearning.AI:Neural Networks and DeepLearning
https://www.deeplearningai.net/classroom/Neural_Networks_and_DeepLearning
[2]https://viso.ai/deep-learning/object-detection/
[3]Liu, L., Ouyang, W., Wang, X. et al. Deep Learning for Generic Object Detection: A Survey. Int J Comput Vis 128, 261-318 (2020). https://doi.org/10.1007/s11263-019-01247-4;
[4]https://tech.meituan.com/2019/10/31/trajectory-prediction-contest.html
[5]Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel,Learning lane graph representations for motion forecasting.ECCV 2020







