
近日,IEEE机器人与自动化国际会议(2024 IEEE International Conference on Robotics and Automation, ICRA2024)在日本横滨举办,Autowise.ai-香港科技大学联合实验室题为《MEDL-U: Uncertainty-aware 3D Automatic Annotation based on Evidential Deep Learning》的研究成果被ICRA2024接收。这是继CVPR、ECCV后,联合实验室的研究工作再次被国际顶会接收。
Autowise.ai创始人兼CEO黄超表示:数据标注是自动驾驶数据闭环的核心,而如何高效且经济地标注数据又是影响自动驾驶技术迭代快慢的关键。此次联合实验室提出的利用证据深度学习(EDL)框架进行3D自动标注的方案,有望显著提升标注工作的效率,减少大量成本高昂的人工手动标注,在自动驾驶技术商业化的过程中实现“降本”且“增效”。

图源2024 IEEE ICRA官网 https://2024.ieee-icra.org/
ICRA是机器人学和自动化领域内最负盛名的国际会议之一,由IEEE机器人与自动化学会(IEEE Robotics and Automation Society)主办。ICRA通过其高质量的论文发表、专题讨论等每年吸引来自全球的顶尖研究人员、工程师和行业专家参与,已经成为机器人和自动化领域内不可或缺的年度盛事。
Autowise.ai-香港科技大学联合实验室由仙途智能Autowise.ai与香港科技大学联合创办,机器学习领域的国际知名学者张潼教授担任实验室主任。实验室旨在充分发挥双方优势,共同推动人工智能技术在无人驾驶领域的工业化落地与创新应用,相关研究工作先后被人工智能顶会CVPR、ECCV接收。

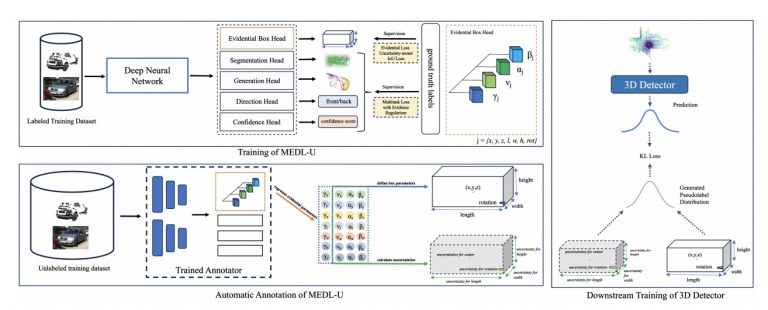
此次联合实验室发表的论文《MEDL-U: Uncertainty-aware 3D Automatic Annotation based on Evidential Deep Learning》聚焦障碍物检测任务中的数据标注。在无人驾驶中,3D障碍物检测方法依赖于大量的手动标注的数据,这不仅效率低下,而且成本高昂。为了减少对手动标注的依赖,研究者们提出了通过弱监督框架为未标注的数据自动生成伪标签的方案。但是,自动生成的伪标签存在噪声,其准确性不如人工标注。为此,本文提出利用证据深度学习(EDL)框架生成伪标签的同时,量化每个3D边界框参数的不确定性,以提高伪标签在实际应用中的性能和可靠性。然而直接将EDL用于3D检测面临的挑战包括伪标签质量相对较低、不确定性估计过高以及缺乏对不确定性的有效解释和利用。为了克服这些问题,研究者们引入了一种基于不确定性感知(Uncertainty-aware)的IoU损失函数、一种证据感知(Evidence-aware)的多任务损失函数,以及一个后处理阶段,用于精细化不确定性的估计。通过一系列实验,MEDL-U证明了其在KITTI数据集上的有效性。与现有的3D自动标注器相比,MEDL-U在验证集上的所有难度级别中都取得了更好的性能,并且在官方测试集上达到了最先进的结果。
产学研协同是驱动创新性研究成果应用到商业化场景的关键路径,仙途智能不断夯实自动驾驶领域的技术研究,积极探索科研成果产出,共同推动自动驾驶的技术迭代,为自动驾驶商业化落地提供全方位的技术支撑,让AI技术释放更具变革性的产业价值。







