联系我们
核心技术

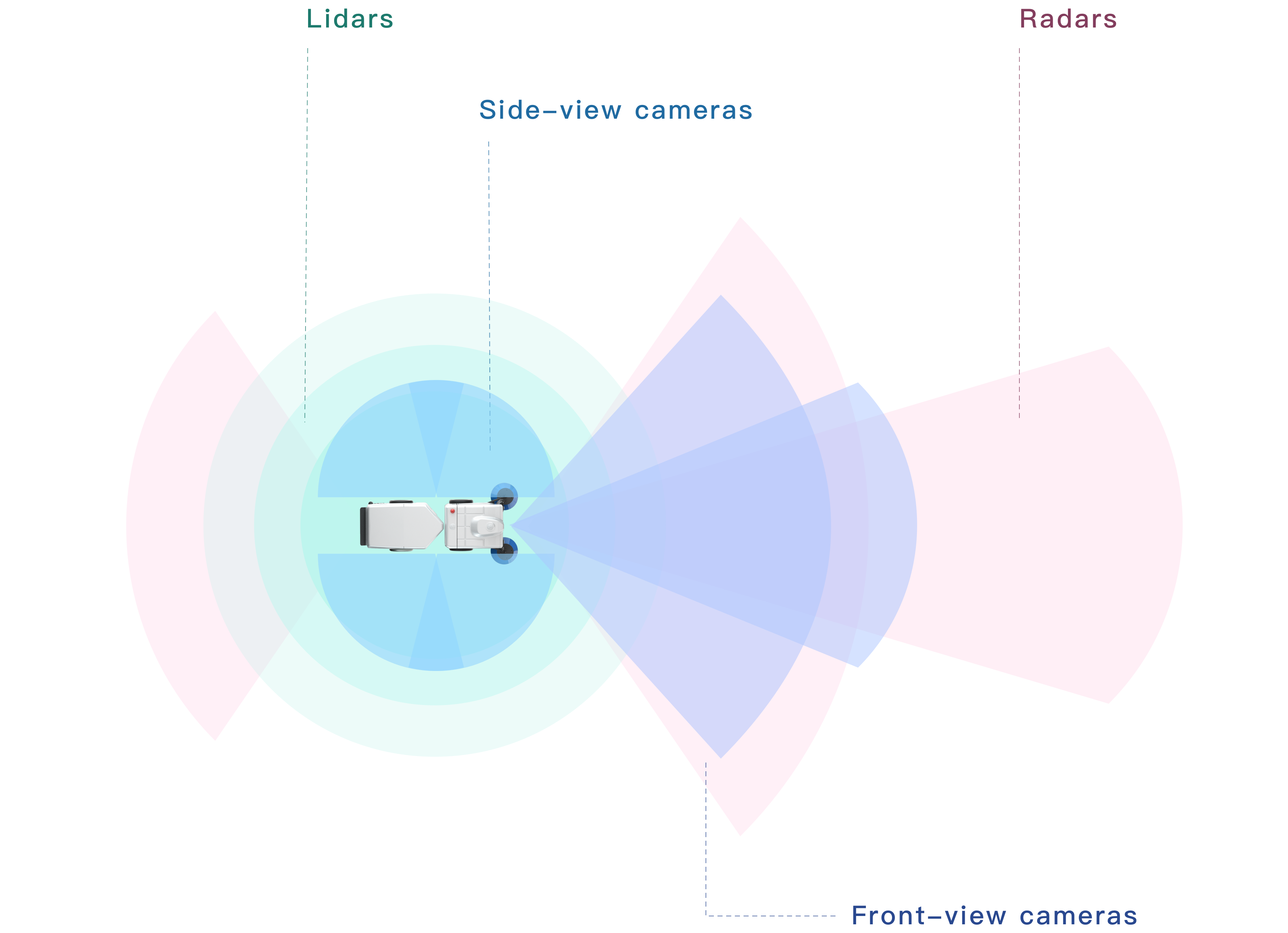
感知模块
基于多传感器的传统算法+BEV的多层冗余方案,以一个多任务大模型支持常见的交通参与元素与长尾通用障碍物的检测识别,提升可靠性和安全性。

定位模块
基于高精地图和现场实时定位,实现厘米级定位,误差3cm以内,确保贴边清扫。
预测模块
对100+障碍物在10ms内能完成同时预测,预测结果与Waymo motion prediction 第一名的 3s 指标持平。
规划模块
采用3D规划,基于欧式坐标系无膨胀的精细化贴边轨迹,考虑自车3D形体(扫刷、车体突出传感器等)和不同高度、材质的路边障碍物交互。
控制模块
使用车规级线控制动系统和双备转向系统,响应精度高。
Arrow left
Arrow right
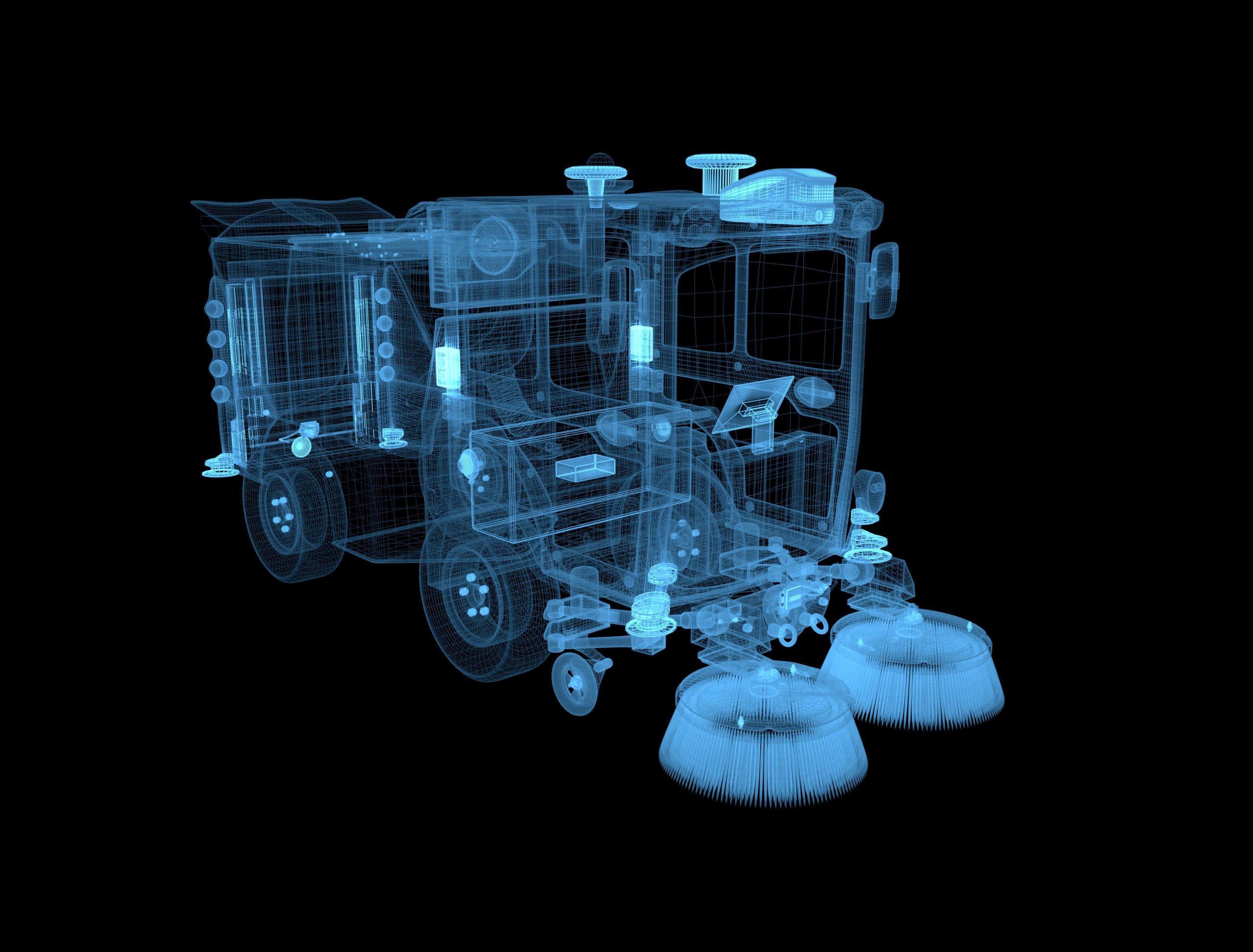
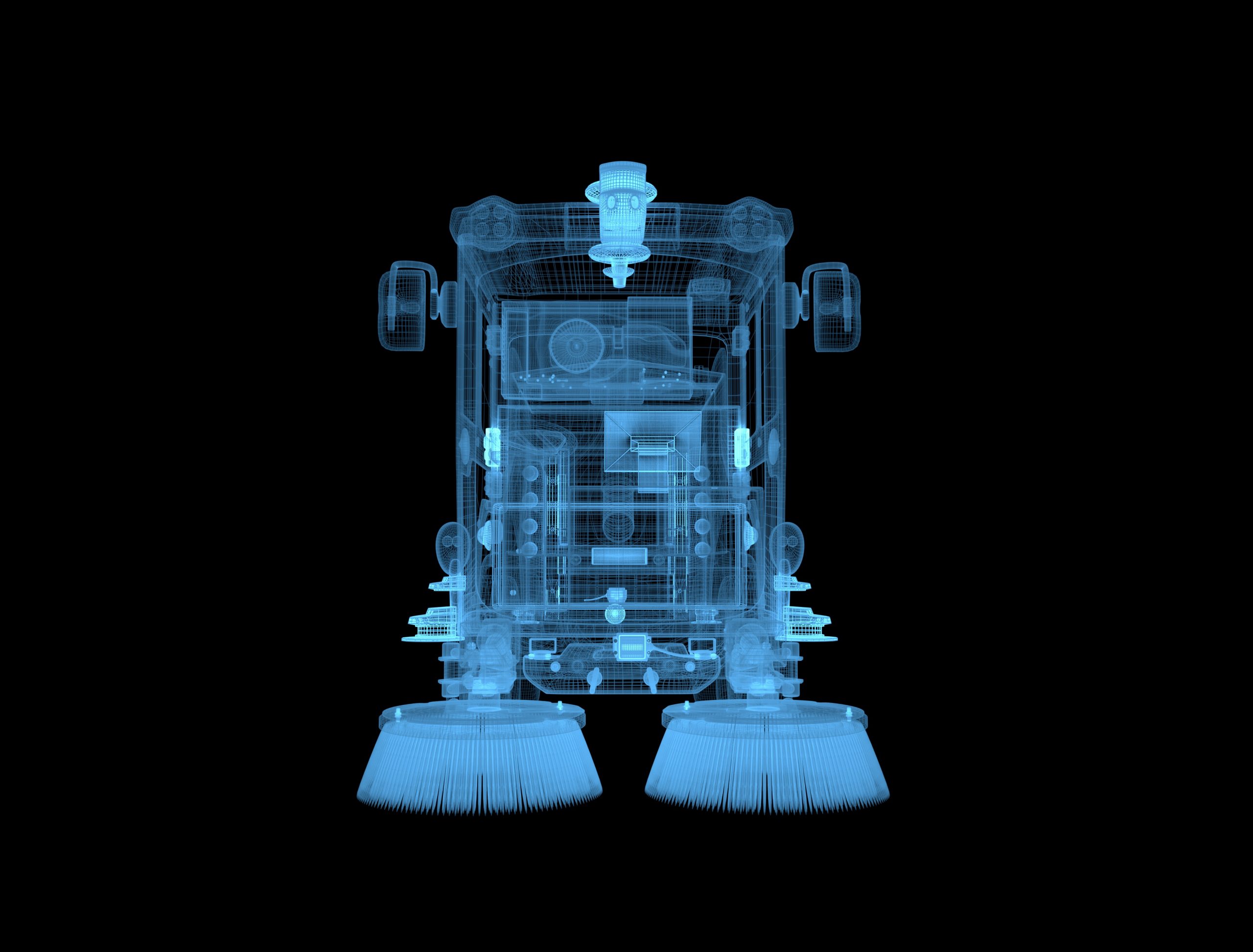
组合导航系统(天线) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
激光雷达 使用人眼安全的激光探测清扫车周边物体。
监控摄像头 实时监看车辆周身情况。
组合导航系统(接收器) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
毫米波雷达 测定清扫车与周边物体的相对位置、相对速度和运动方向。
监控摄像头 实时监看车辆周身情况。
激光雷达 使用人眼安全的激光探测清扫车周边物体。
监控摄像头 实时监看车辆周身情况。
监控摄像头 实时监看车辆周身情况。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
组合导航系统(接收器) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
毫米波雷达 测定清扫车与周边物体的相对位置、相对速度和运动方向。
感知摄像头 捕捉图像识别算法需要使用的影像数据。
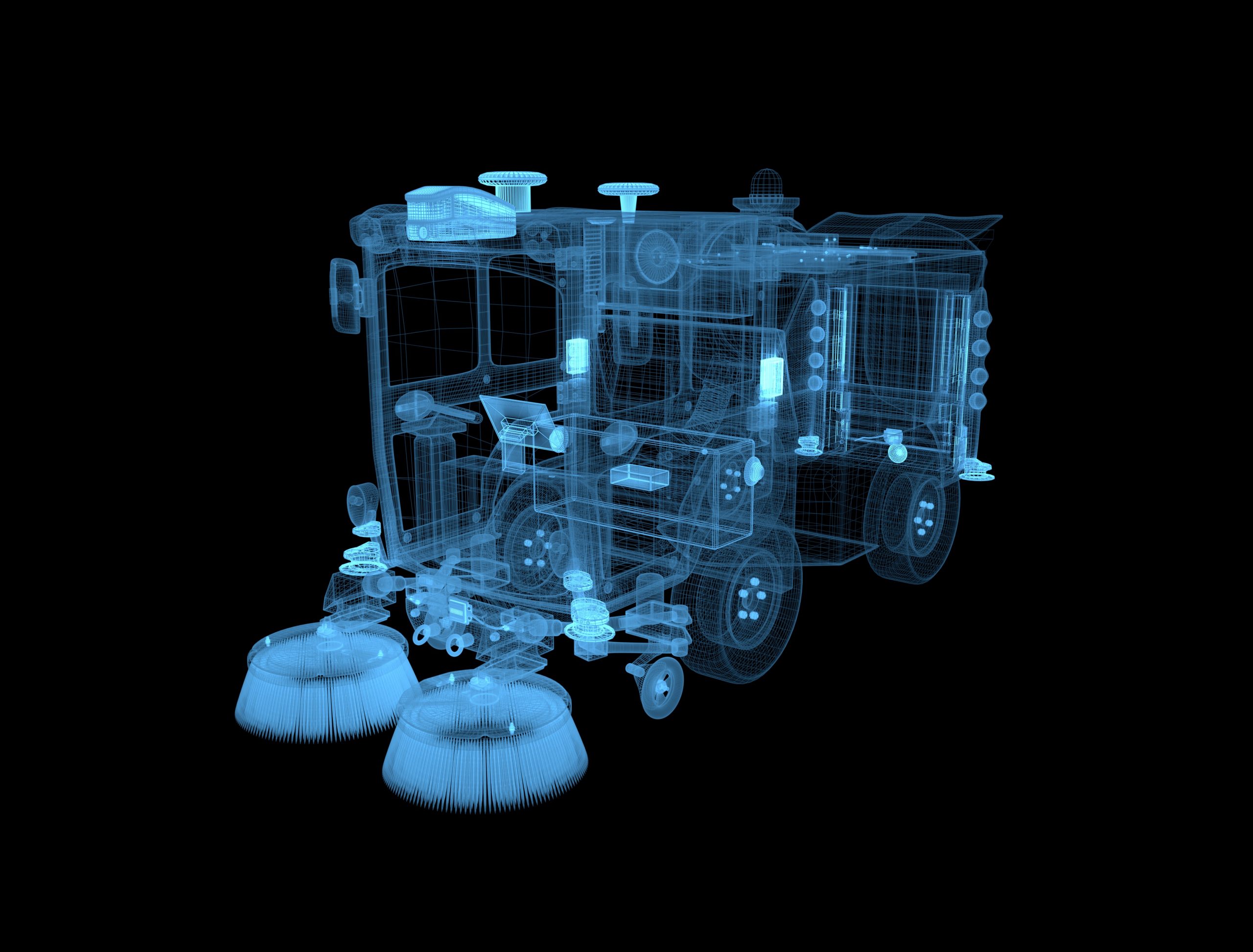
组合导航系统(天线) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
激光雷达 使用人眼安全的激光探测清扫车周边物体。
监控摄像头 实时监看车辆周身情况。
组合导航系统(接收器) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
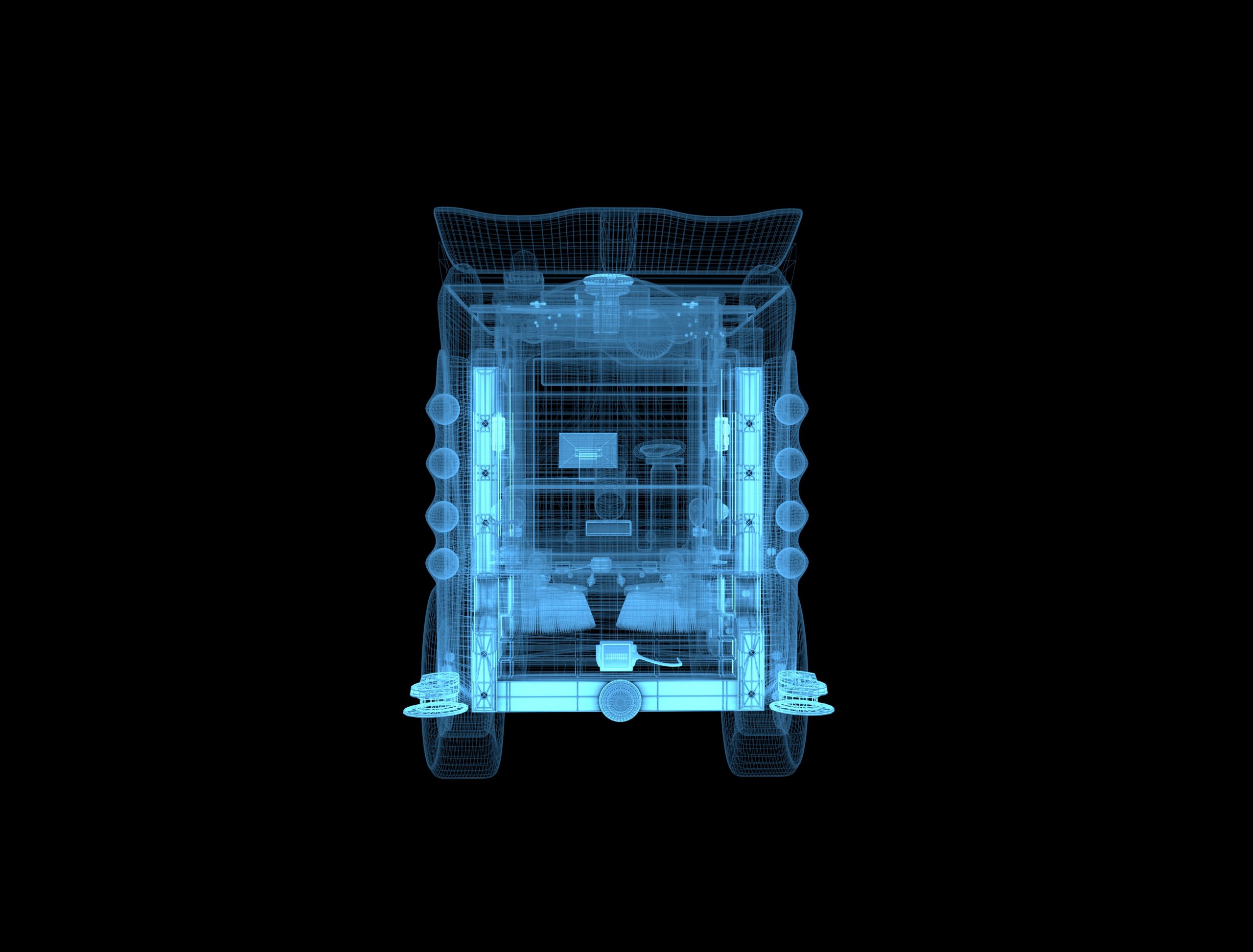
组合导航系统(天线) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
碰撞传感器 在车辆发生碰撞时向工程师发出警报。
碰撞传感器 在车辆发生碰撞时向工程师发出警报。
组合导航系统(接收器) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
超声波雷达 使用超声波探测车辆近距离范围内物体。
激光雷达 使用人眼安全的激光探测清扫车周边物体。
激光雷达 使用人眼安全的激光探测清扫车周边物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
毫米波雷达 测定清扫车与周边物体的相对位置、相对速度和运动方向。
监控摄像头 实时监看车辆周身情况。
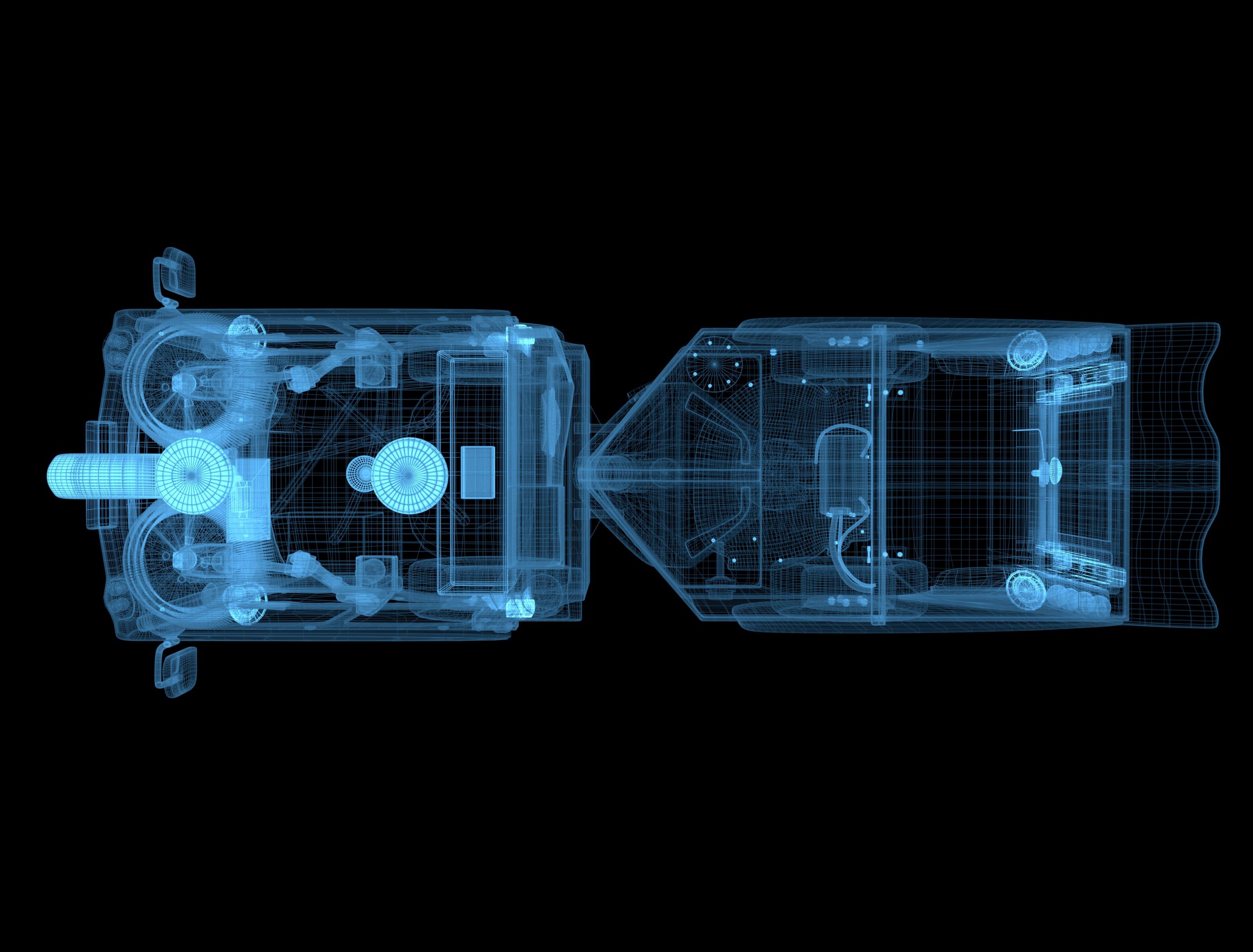
激光雷达 使用人眼安全的激光探测清扫车周边物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
组合导航系统(天线) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
组合导航系统(接收器) 组合导航系统对清扫车提供基础定位数据源,融合雷达、相机数据进行融合定位。
超声波雷达 使用超声波探测车辆近距离范围内物体。
超声波雷达 使用超声波探测车辆近距离范围内物体。
远程运营平台 Radar24

状态诊断
平台可实时检测车辆作业情况,监测、诊断车辆方向盘、刹车、油门、自动驾驶系统软硬件状态。设有预警功能,及时告知异常状态。
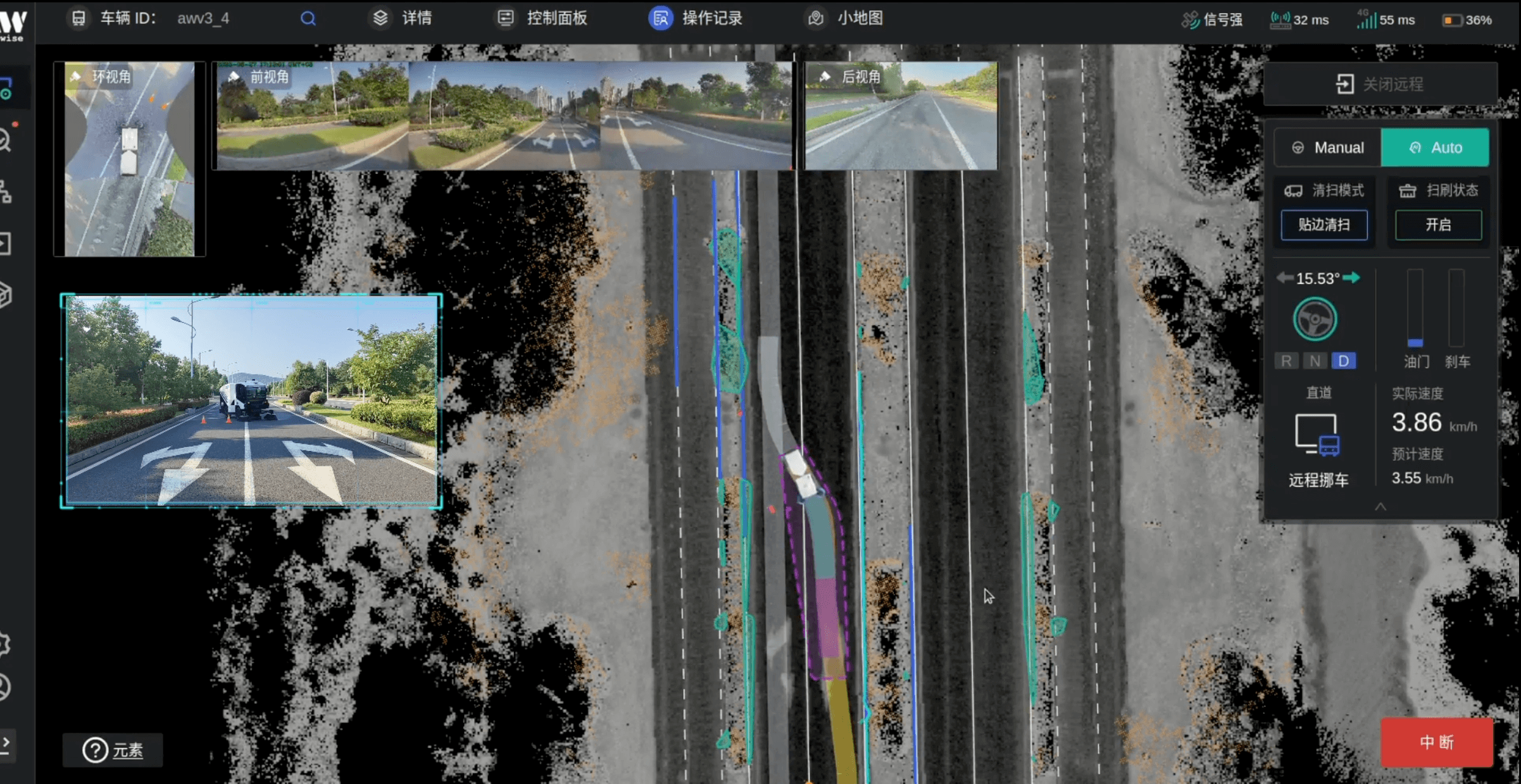
智能控车
车辆出现异常卡停时,运营人员可通过平台,实现远程挪车、智能绕障、切换路线等操作,保证车辆正常作业。
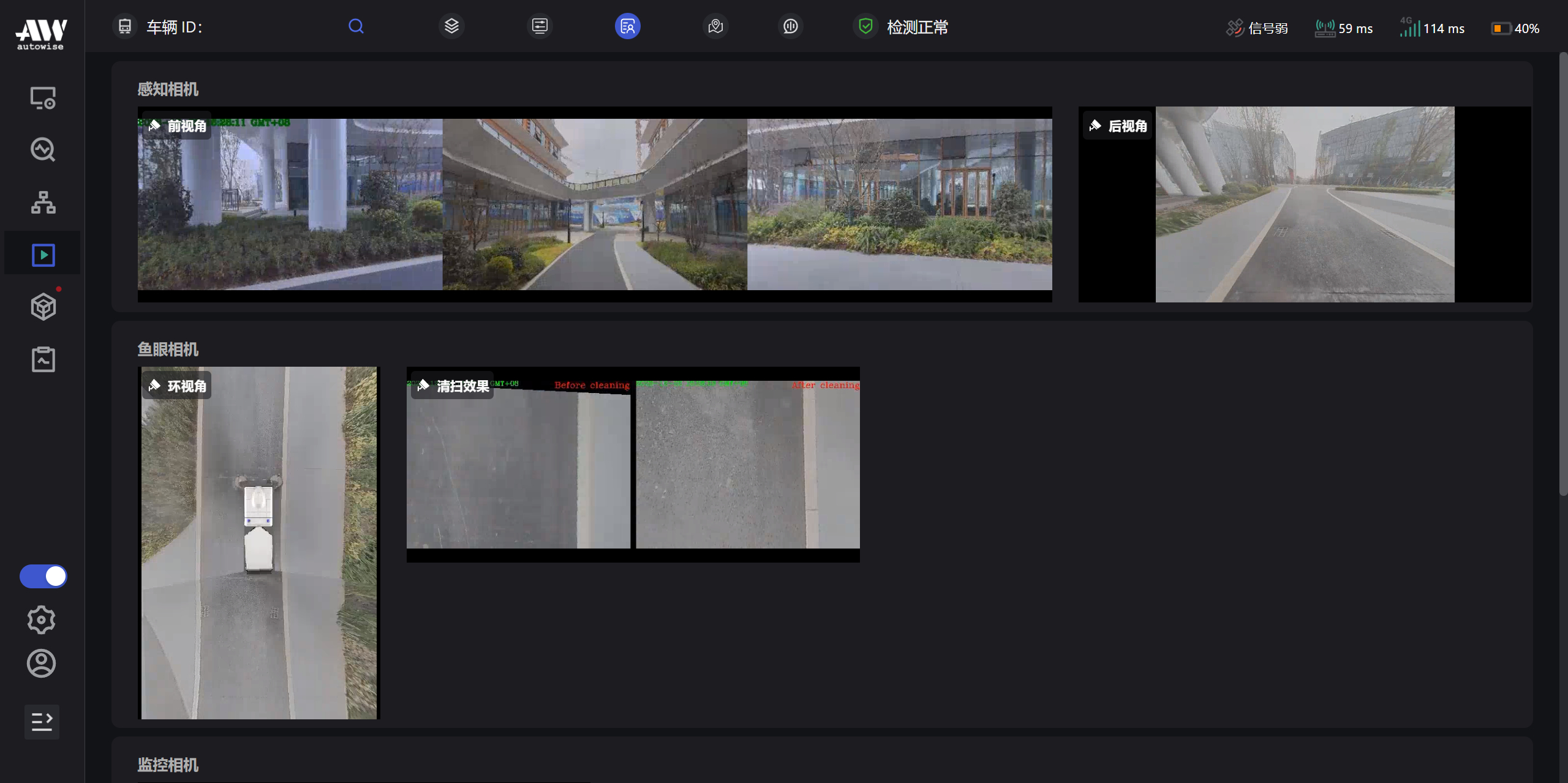
可视化监控
平台可实时显示丰富、动态的道路信息,以及车辆前视角、后视角、左右扫刷视角等各视角的现场运行环境,识别障碍物及视觉盲区,保证车辆行驶安全。
远程运营APP WiAction
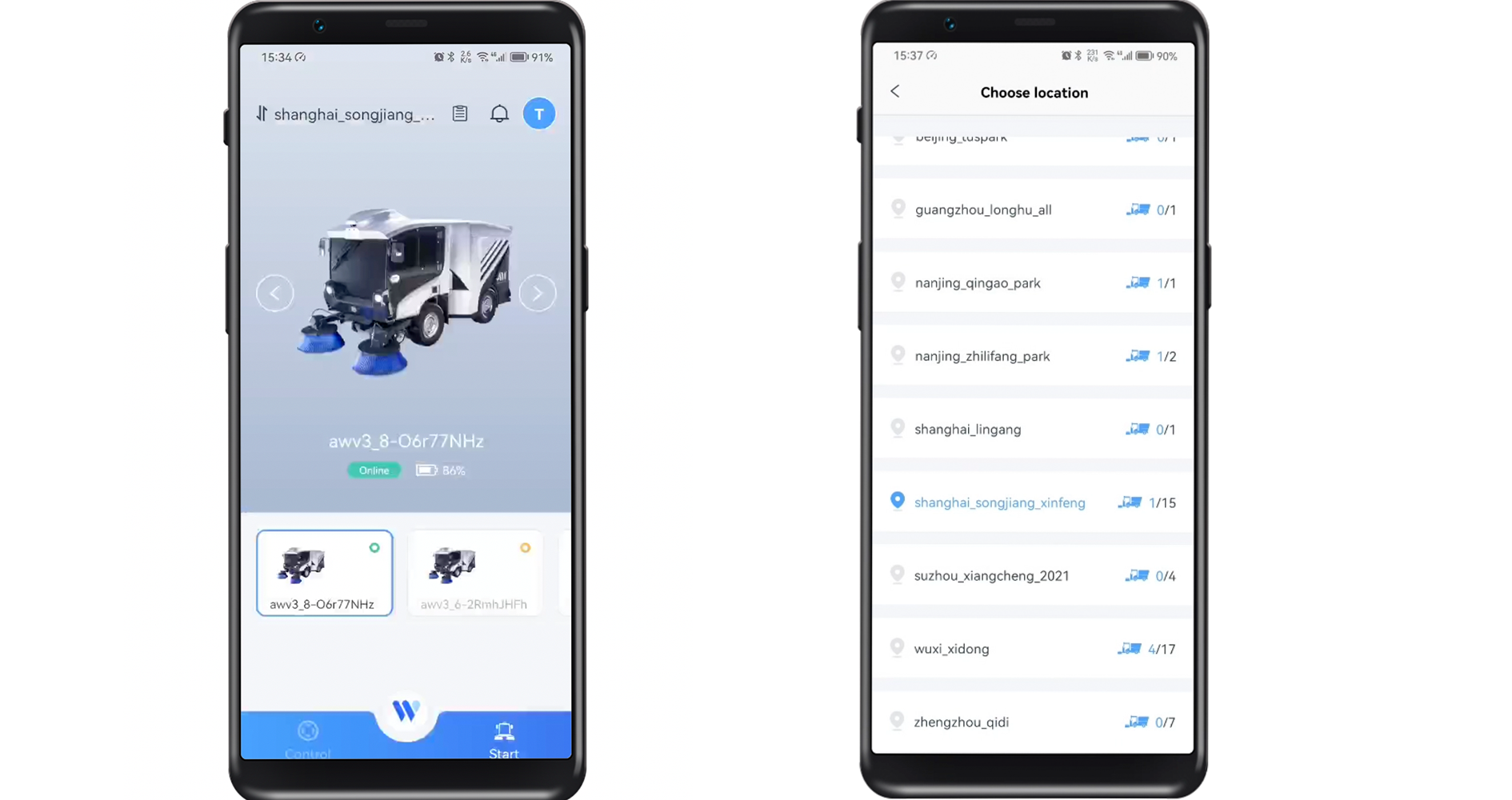
任务选择
用户可根据清扫任务,切换清扫场地和左右滑动选择执行清扫任务的车辆。
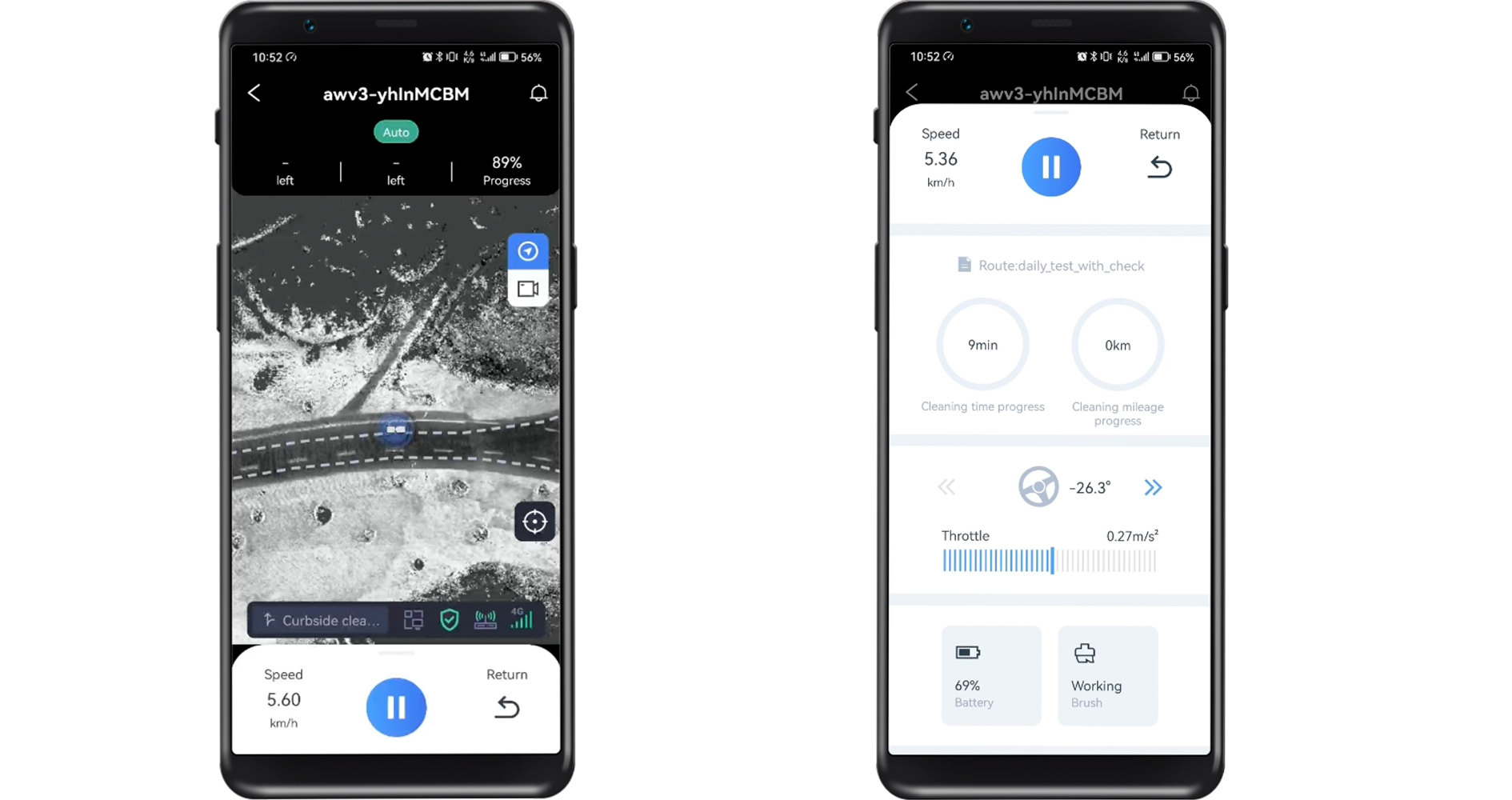
远程控制
用户可通过平台远程启停车辆,随时查看车辆运行实况、车辆清扫任务、电门/刹车、电池电量等状态,任务完成后可一键操作车辆自动返回起点、停车入库。
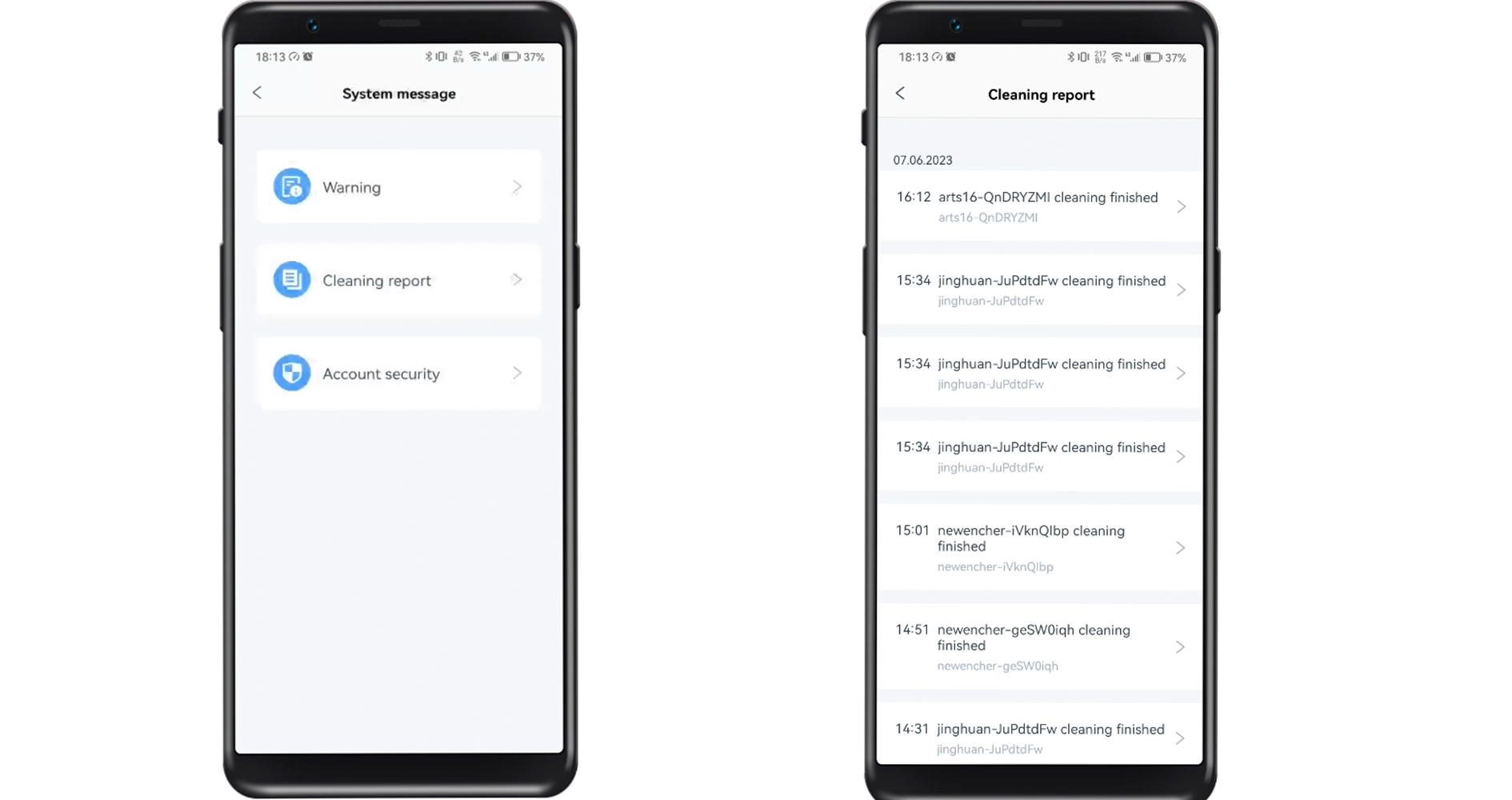
查看报告
在自动完成清扫任务后,平台自动生成作业报告,用户可通过查看系统日志和清扫报告,分析清扫效果。

自动紧急制动系统 (AEB)
使用传感器探测自动驾驶清扫车与物体、行人和周围车辆的距离,在碰撞可能发生时,采取紧急制动。在手动模式下,如果系统判定即将发生碰撞,AEB也会发出预警。

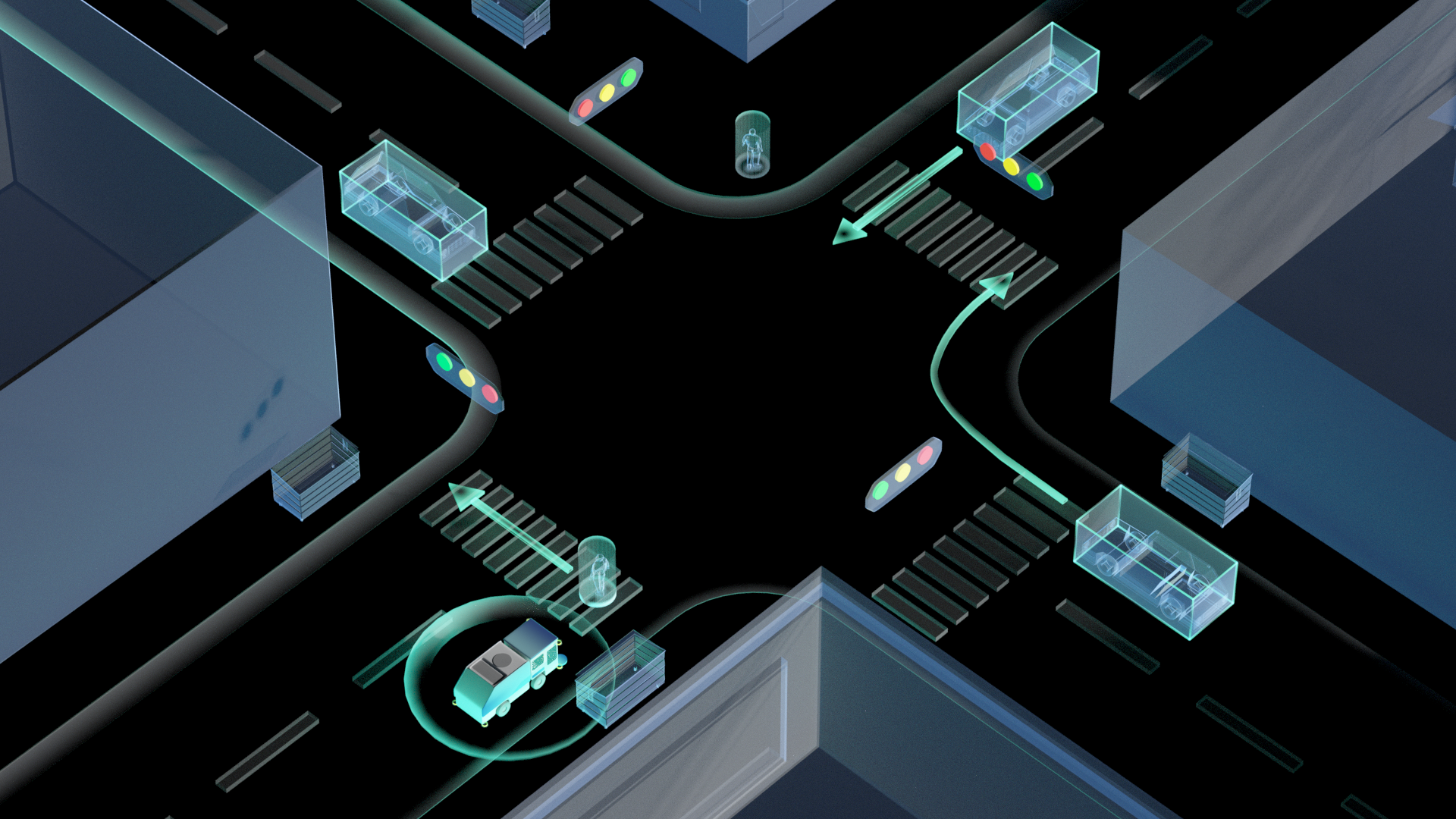
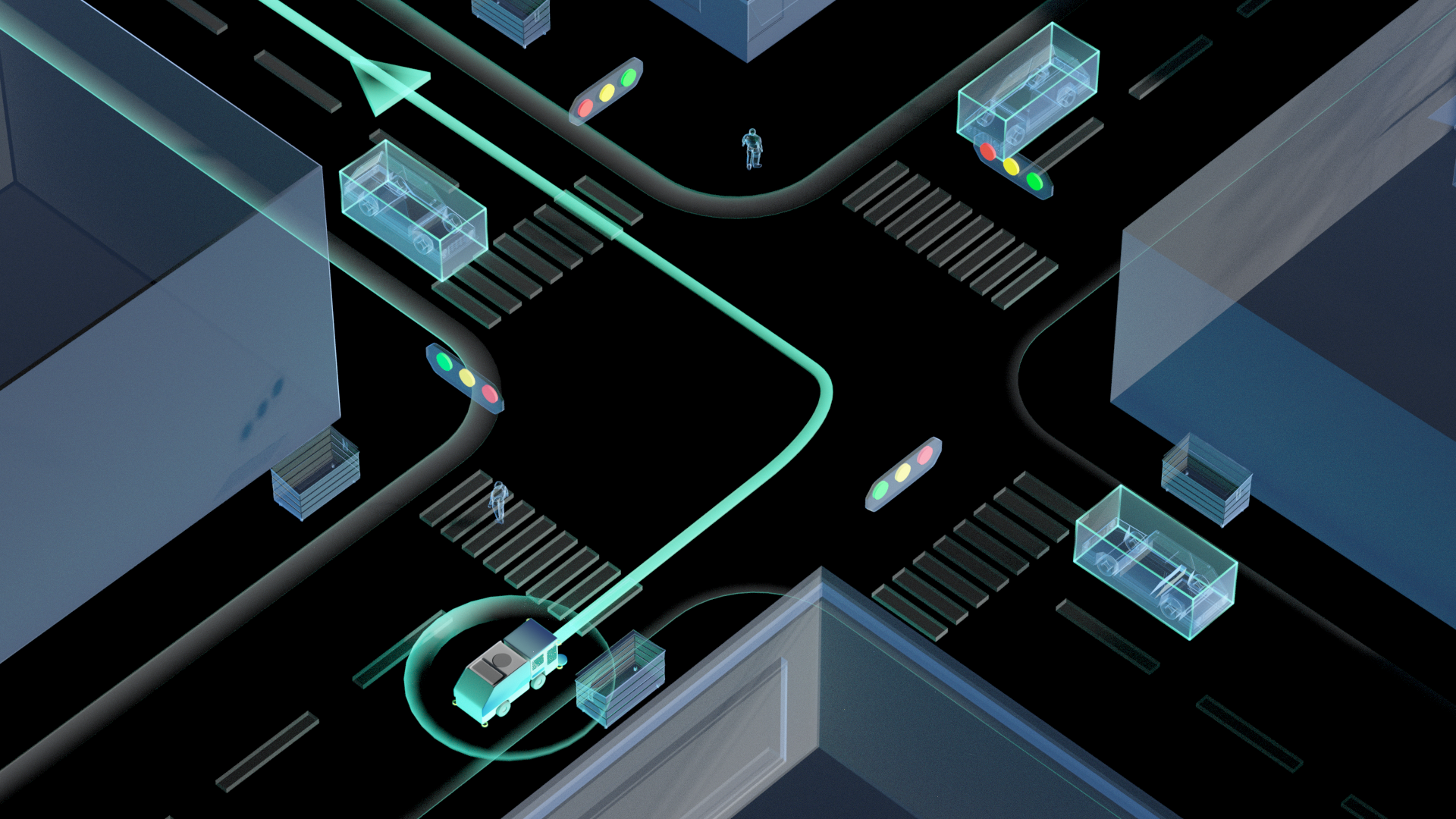
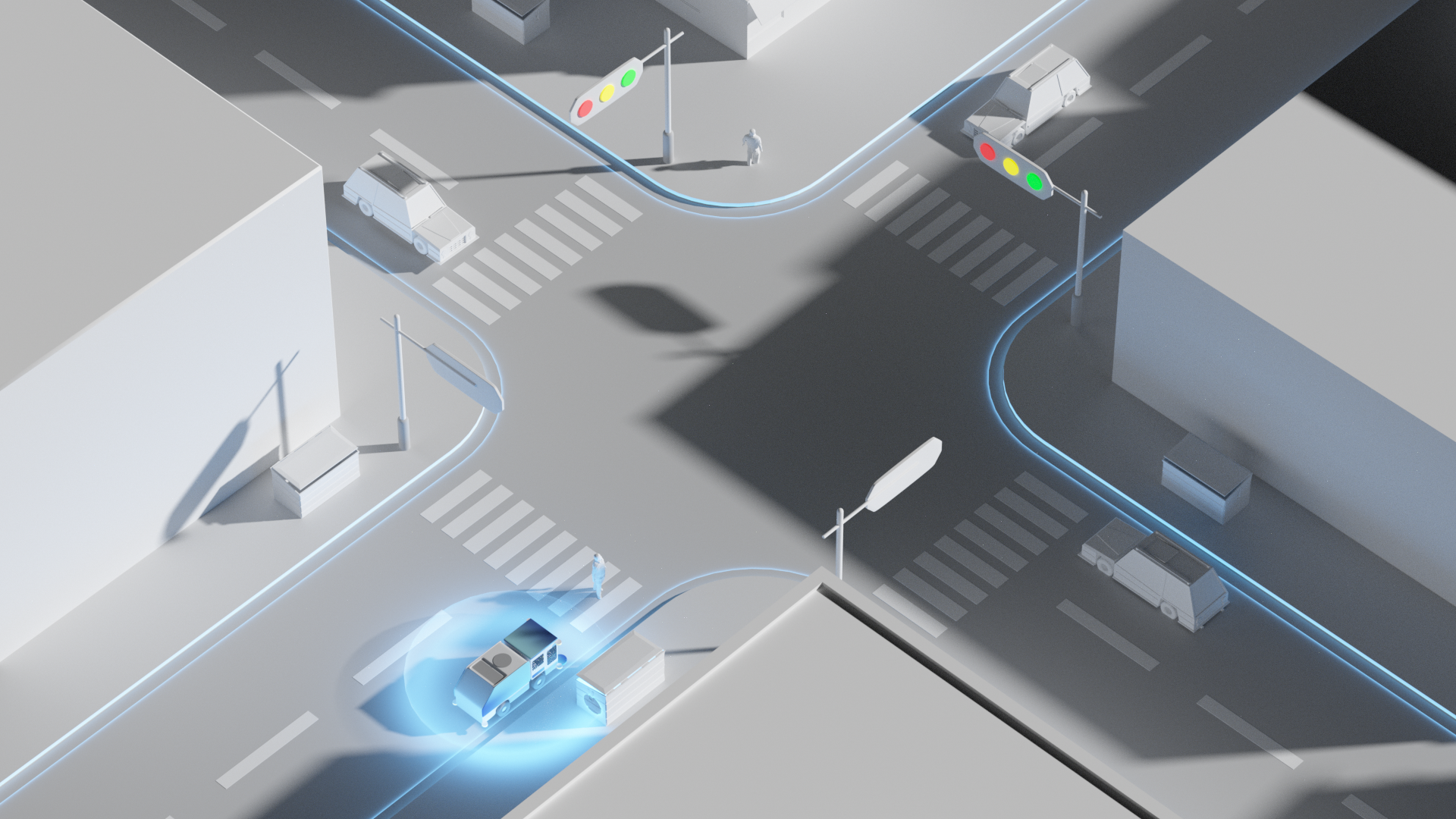
交通信号灯识别
在集成算法和车载摄像头的辅助下,自动驾驶清扫车能够识别交通信号灯,遇红灯时停止,遇绿灯时行驶。
物体检测
自动驾驶清扫车使用传感器识别附近的人类、动物、静止物体或移动物体。如果遇到障碍物,清扫车会自动调整路线,避免碰撞。


备用计算系统
采用场外辅助计算机作为车载套件和ECS的备用系统。如果车载套件发生故障,备用系统就会接替车载计算系统运行。

区域化数据中心
客户端数据将存储在距离运营场景最近的数据中心。

数据加密
云端存储的所有数据会从可阅读格式或纯文本格式,转换为不可阅读的编码格式,并进行加密传输。
系统诊断
系统自动进行诊断和自查,以发现运行问题、判定系统状态及查找问题原因。
盲区检测
利用安装在车辆侧方及后方的超声波和雷达传感器组成的冗余传感器方案,BSD可以追踪车辆前方、侧方及邻近车道的车辆,避免视觉盲区,保障行车安全。








FOLLOW US